gps室外导航,想让deepcar去哪里,app上点击生成航线即可

通过三个基站和一个标签,可以精确定位deepcar的室内位置,为室内导航提供准确的信息

通过图像识别技术,实现室外自动驾驶

设计开放

通过激光雷达实现构图导航

可以添加其他传感器设备

基于arduino和树莓派
PC端软件,支持Wiondows、Linux和Mac OS
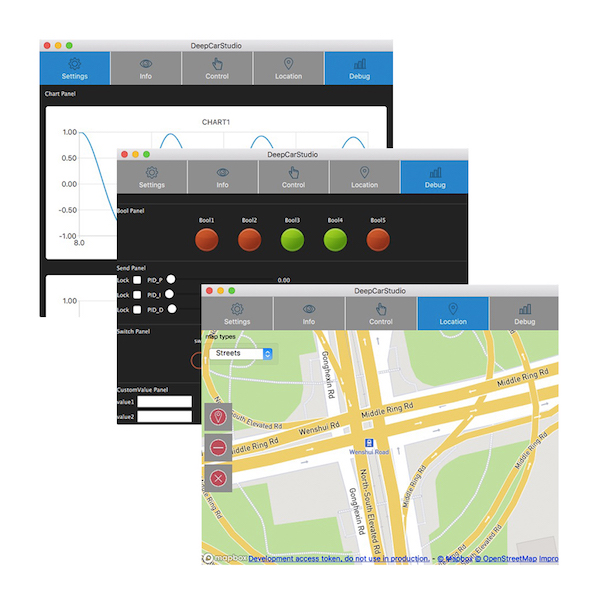
可以实时查看DeepCar回传的电量、速度、室内地图、GPS位置等状态信息
可以远程遥控DeepCar
可以调试deepcar
可以设置和编辑航线,让deepcar通过gps按照预设的航线行驶
移动端应用,目前支持安卓系统
可以实时查看DeepCar回传的电量、速度、室内地图、GPS位置等状态信息
可以远程遥控DeepCar
可以调试deepcar
可以设置和编辑航线,让deepcar通过gps按照预设的航线行驶